


With the technology development of computer, sensor and AI, many achievements have been reached in obstacle avoidance of mobile machine and auto navigation. These achievements are applied in various realms while the technology is becoming increasingly complex. The requirements of autonomous way-finding of mobile robot have been greatly improved, from just functioning, to the integration of reliability, universality and high efficiency, thus the requirements for related technologies are consequently enhanced. Obstacle avoidance is a basic function of robots. This function can be realized not only by visual perception, but also by touching or ultrasonic sensing, just like bats. Accordingly, detection robots can be divided into two types: contact-type and non-contact type.
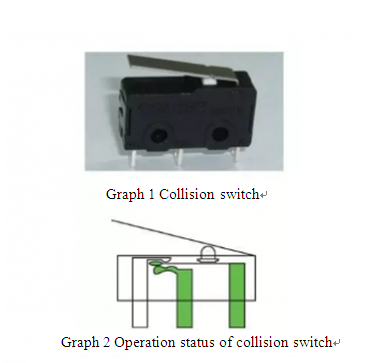
Contact type obstacle detection sensor adopts a collision switch (graph 1). The operation principle of Collision switches is very simple. It depends entirely on internal mechanical structure to connect or disconnect the circuit. When the external detection arm of collision switch is collided, it will be pushed down and drive the reed inside the switch to stir, so that the connection status of this circuit is altered.(graph 2)
The operation principle of non-contact obstacle switch is similar to sonar and radar. It emits a certain type of sound wave, which would be reflected when reaching any obstacle, and be received by the sensor. In this case ,the sensor will treat it as obstacle found.
Also, ultrasonic sensors are also one of most commonly used sensors for obstacle avoidance and distance measurement of mobile robot. Ultrasonic sensor is an electronic module of 3~400cm measurement range. It can help robots to keep away from barriers, or be applied in distance measurement and obstacle avoidance projects. The operation principle of ultrasonic sensors is: emit an ultrasonic signal and start timing simultaneously. The sound wave spreads in the air and get reflected as soon as it encounters obstacle. Timing is stopped right at the moment that ultrasonic receiver receives the echo. Given that the speed of sound wave in the air is 340m/s, the distance s can be calculated with the logged time t, i.e.s = 340×t / 2. Since the speed of ultrasonic wave can be influenced by temperature and humidity, these factors are considered in measurements that requires high accuracy. Commonly speaking, the operating range of ultrasonic sensors is within 5-10cm, but there is a minimum detection dead zone of scores of mm. As a frequently used type of sensors, Ultrasonic sensors are convenient in use, cheap in cost and mature in technology. Be aware that the sensors on robots shouldn’t be installed too close to the floor, or jamming signal may be generated, and the sensor may mistakenly treat obstacles that it can go across as if it cannot. Also, the distance between two probes of a sensor should be properly set, for that too long distance leads to larger error, and too short distance leads to strong jamming signal.
For distance measurement and obstacle avoidance of robots, we ISweek recommend MaxBotix Ultrasonic Rangefinder– MB7066

MB7066 Ultrasonic Rangefinder is a rugged ultrasonic sensor component module. This outdoor sensor provides very short to long distance detection and ranging in a compact, robust PVC housing. The ultrasonic sensor meets the IP67 water intrusion standard and matches standard electrical 3/4‑inch PVC pipe fittings. This sensor shows excellent weather resistance and optional chemo-resistance, making it easy to be integrated into project or product design. The maximum detection range of 42kHz ultrasonic sensor to detect objects is 1068cm (450 inches), and the sensor’s operation temperature range is between -40˚C + 70˚C(-40˚F + 160˚F). High output acoustic power combined with continuously variable gain, real‑time background automatic calibration, real‑time waveform signature analysis, and noise rejection algorithms results in virtually noise free distance readings. This holds true even in the presence of many of the various acoustic or electrical noise sources. The MB7066 sensors are factory calibrated to match narrow sensor beam patterns and provide reliable long range detection zones.



